Win10-WSL-Ubuntu18.04-ROS-melodic 安装与配置
一、WSL 安装 Ubuntu18.04
- Win10 启用 WSL
管理员身份运行:
1 | dism.exe /online /enable-feature /featurename:Microsoft-Windows-Subsystem-Linux /all /norestart |
重启电脑。
打开 Microsoft Store,安装 Ubuntu18.04
启动 Ubuntu18.04,创建账号、密码
安装 Windows Terminal(可选)
用 scoop 安装。
1 | scoop install windows-terminal |
windows-terminal 简单设置:字体、启动目录。
1 | { |
- 设置源,更新(可选)
打开配置文件: sudo nano /etc/apt/sources.list, 替换成以下内容:
1 | # 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 |
ref: https://mirrors.tuna.tsinghua.edu.cn/help/ubuntu/
更新:sudo apt update
升级:sudo apt upgrade
- 安装 ZSH、oh-my-zsh(可选)
二、安装 ROS-melodic
ref: http://wiki.ros.org/melodic/Installation/Ubuntu
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
- 设置 keys
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
- 安装
1 | sudo apt update |
- 设置环境变量
1 | # zsh |
- 安装必要的依赖
1 | sudo apt install python-rosdep |
sudo rosdep init需要从raw.githubusercontent.com下载文件。如果报错,可以试下修改 hosts:
2
3
4
sudo nano /etc/hosts
# 在文件末尾添加
151.101.84.133 raw.githubusercontent.com
- 测试一下
1 | roscore |
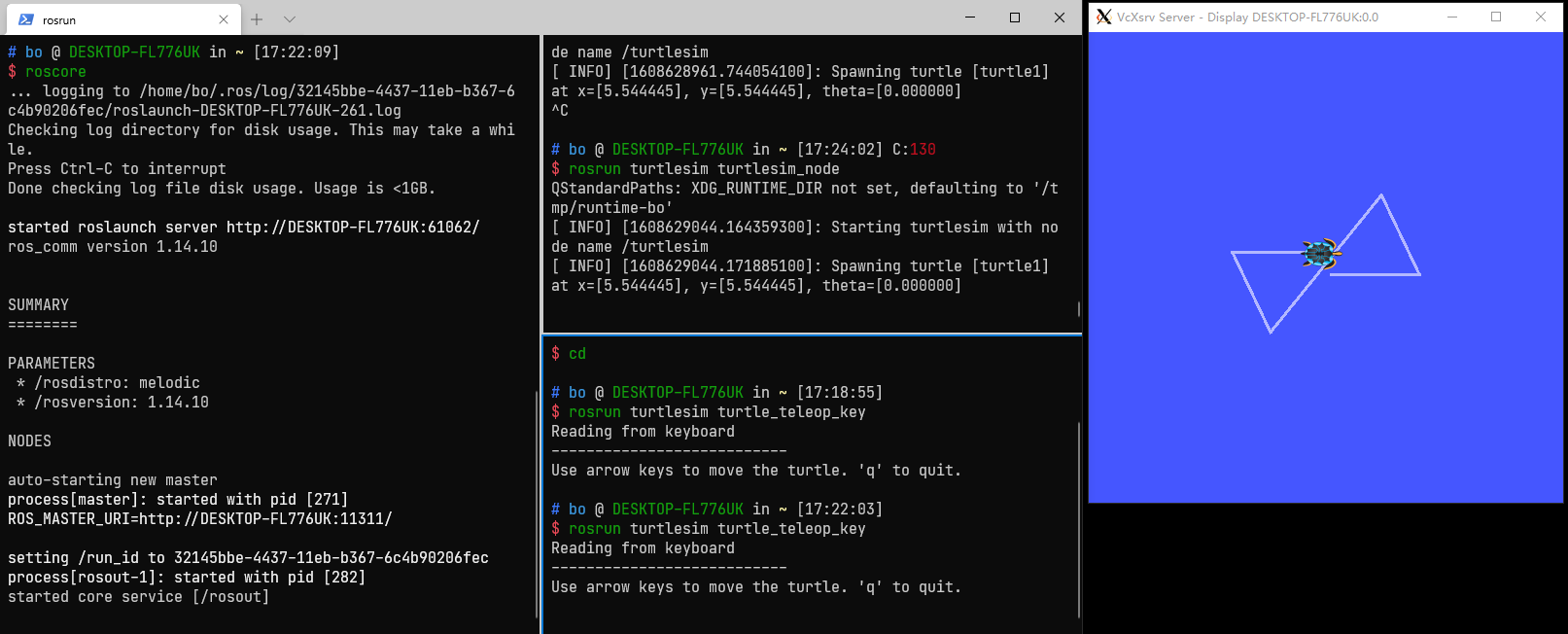
- 测试一下小乌龟
先在 win10 下安装 X Server:
scoop install vcxsrv.然后依次在 Ubuntu18.04下打开三个 terminal:
1 | # terminal - 1 |
windows terminal 分屏快捷键:
快捷键 功能 ctrl + shift + w closePane alt + shift + - splitPane: horizontal alt + shift + + splitPane: vertical